Building a neural network#
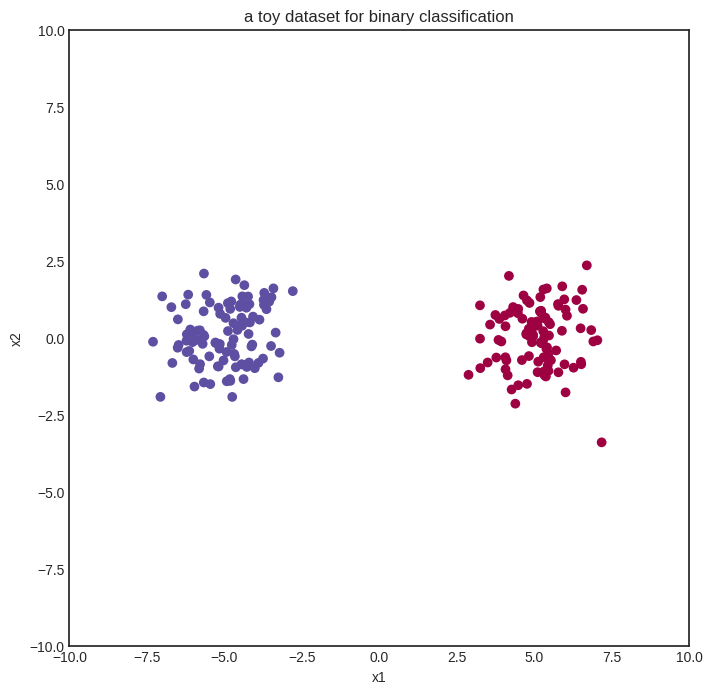
We start with a simple binary classification problem to demonstrate how neural networks work. Here’s our (generated) dataset of two blue and red classes encoded with 0 and 1.
import random
import matplotlib.pyplot as plt
xs = [(random.normalvariate(0, 1) - 5 , random.normalvariate(0, 1)) for _ in range(100)] \
+ [(random.normalvariate(0, 1) + 5 , random.normalvariate(0, 1)) for _ in range(100)]
ys = [1 for _ in range(100)] + [0 for _ in range(100)]
Show code cell source
with plt.style.context("seaborn-v0_8-white"):
plt.figure(figsize=(8, 8))
plt.xlim([-10, 10])
plt.ylim([-10, 10])
plt.scatter([x[0] for x in xs], [x[1] for x in xs], c=ys, cmap=plt.cm.Spectral)
plt.title("a toy dataset for binary classification")
plt.xlabel("x1")
plt.ylabel("x2")
plt.show()
We’ll start with the simplest neural network: zero hidden layers and sigmoid activation. This is also known as logistic regression. Here we go:
from mlfz.nn import Model
from mlfz.nn.scalar import Scalar, sigmoid, binary_cross_entropy
class ZeroLayerNetwork(Model):
def __init__(self):
self.a1 = Scalar(1)
self.a2 = Scalar(1)
self.b = Scalar(1)
def forward(self, x):
x1, x2 = x
return sigmoid(self.a1 * x1 + self.a2 * x2 + self.b)
def parameters(self):
return {"a1": self.a1, "a2": self.a2, "b": self.b}
model = ZeroLayerNetwork()
We can visualize the untrained model on a heatmap, coloring according to predictions.
Show code cell source
import numpy as np
def visualize_model(model, xs, ys, res=100, xrange=(-10, 10), yrange=(-10, 10)):
with plt.style.context("seaborn-v0_8-white"):
plt.figure(figsize=(8, 8))
res = 100
x = np.linspace(xrange[0], xrange[1], res)
y = np.linspace(yrange[0], yrange[1], res)
xx, yy = np.meshgrid(x, y)
zz = np.vectorize(lambda x, y: model((x, y)).value)(xx, yy)
# plot the decision boundary
plt.contourf(xx, yy, zz, levels=100, cmap='coolwarm_r', alpha=0.4)
plt.xlabel('x')
plt.ylabel('y')
plt.title('the decision boundary of our model')
# plot the data
plt.scatter([x[0] for x in xs], [x[1] for x in xs], c=ys, cmap=plt.cm.Spectral, zorder=10)
plt.show()
visualize_model(model, xs, ys)
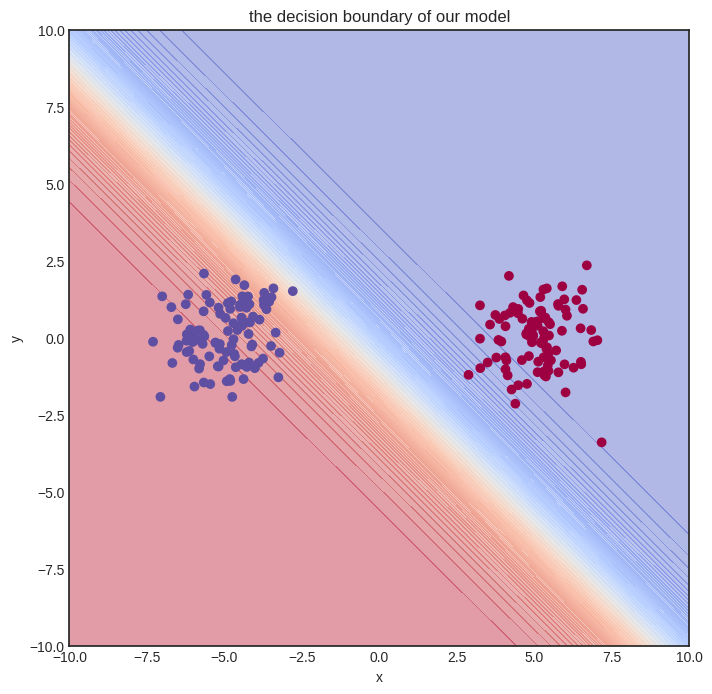
The initial model gets nothing right, so let’s train it!
n_steps = 100
lr = 0.1
for i in range(1, n_steps + 1):
preds = [model(x) for x in xs]
l = binary_cross_entropy(preds, ys)
l.backward()
model.gradient_update(lr)
if i == 1 or i % 10 == 0:
print(f"step no. {i}, loss = {l.value}")
step no. 1, loss = 5.025041985167245
step no. 10, loss = 0.07125507955417765
step no. 20, loss = 0.029065634451322642
step no. 30, loss = 0.01840495328853839
step no. 40, loss = 0.013529241137846967
step no. 50, loss = 0.010726888845382278
step no. 60, loss = 0.008903711674840472
step no. 70, loss = 0.007621011921518769
step no. 80, loss = 0.006668455849913537
step no. 90, loss = 0.005932497820554603
step no. 100, loss = 0.005346406531361452
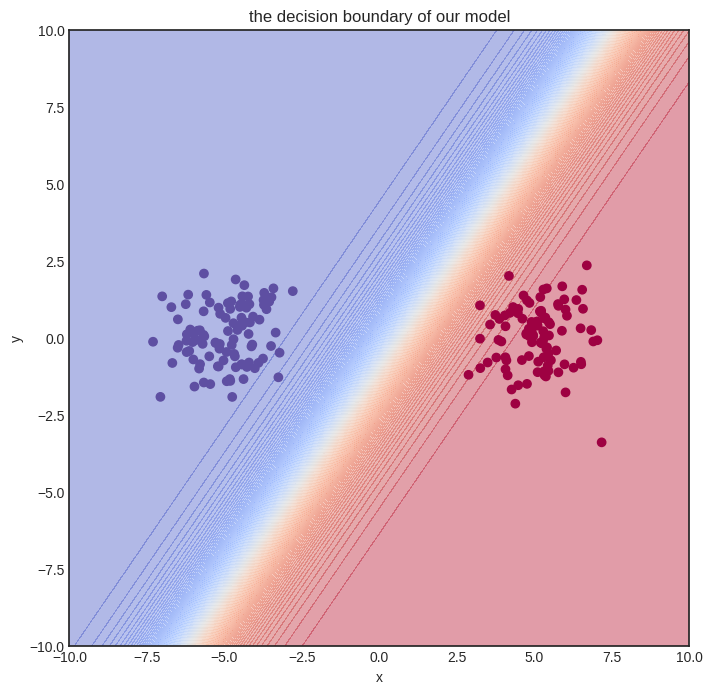
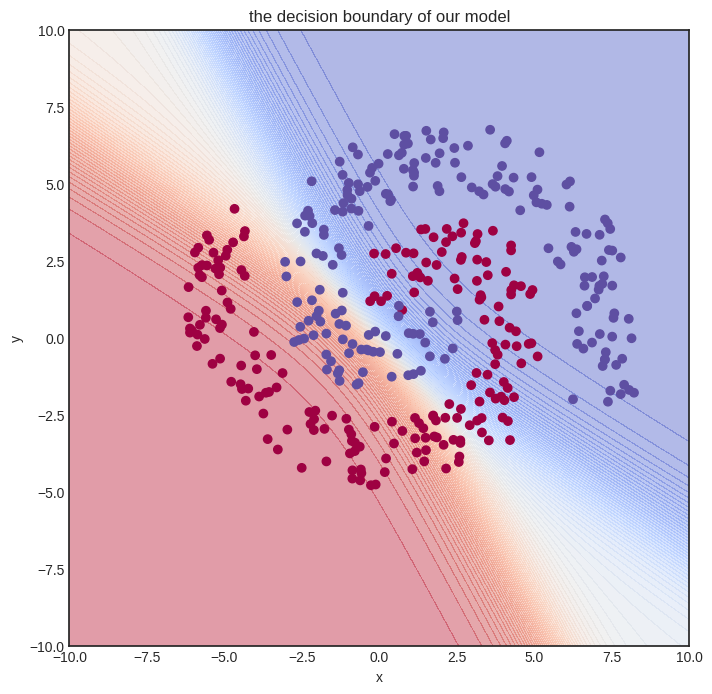
Here’s how the model performs after training.
Show code cell source
visualize_model(model, xs, ys)
Solving a simple problem like that is no big deal. Can we handle more complex datasets?
A multi-layer network#
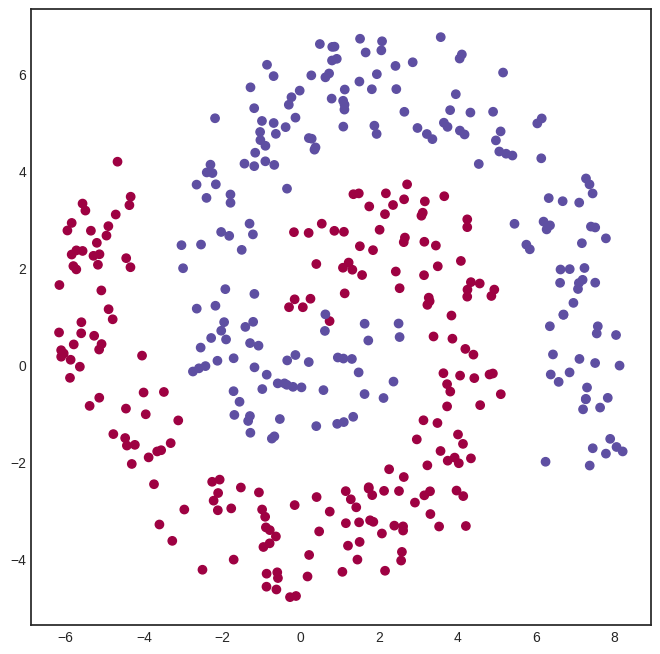
Here’s a spiral-like dataset with classes intertwined into each other.
Show code cell source
import math
def generate_spiral_dataset(n_points, noise=0.5, twist=380):
random_points = [math.sqrt(random.random()) * twist * 2 * math.pi/360 for _ in range(n_points)]
class_1 = [(-math.cos(p) * p + random.random()*noise, math.sin(p) * p + random.random()*noise) for p in random_points]
class_2 = [(math.cos(p) * p + random.random()*noise, -math.sin(p) * p + random.random()*noise) for p in random_points]
xs = class_1 + class_2
ys = [0 for _ in class_1] + [1 for _ in class_2]
return xs, ys
xs, ys = generate_spiral_dataset(200, noise=2)
Show code cell source
with plt.style.context("seaborn-v0_8-white"):
plt.figure(figsize=(8, 8))
plt.scatter([x[0] for x in xs], [x[1] for x in xs], c=ys, cmap=plt.cm.Spectral)
plt.show()
For this problem, we need a hidden layer. Here’s a model with a hidden layer of eight neurons, connected via the
activation function.
from mlfz.nn.scalar import tanh
from itertools import product
class OneLayerNetwork(Model):
def __init__(self):
self.A = [[Scalar.from_random() for j in range(4)]
for i in range (2)]
self.B = [Scalar.from_random() for i in range(4)]
def forward(self, x):
"""
x: a tuple of two Scalars
"""
fs = [sum([self.A[i][j] * x[i] for i in range(2)]) for j in range(4)]
fs_relu = [tanh(f) for f in fs]
gs = sum([self.B[i] * fs_relu[i] for i in range(4)])
return sigmoid(gs)
def parameters(self):
A_dict = {f"a{i}{j}": self.A[i][j] for i, j in product(range(2), range(4))}
B_dict = {f"b{i}": self.B[i] for i in range(4)}
return {**A_dict, **B_dict}
We can already see one of the glaring flaws of our Scalar implementation of computational graphs: the inability to write vectorized code. For instance, the expression
fs = [sum([self.A[i][j] * x[i] for i in range(2)]) for j in range(4)]
is simply the matrix product of the input x and the \( 2 \times 4 \) parameter matrix A.
We’ll deal with vectorization later with the Tensor class, but let’s stick to the vanilla version for now. Here’s our model.
model = OneLayerNetwork()
And here’s how the untrained model looks.
Show code cell source
visualize_model(model, xs, ys)
Let’s train it! We’ll need quite some more steps. To spice things up, we’ll also use a simple learning rate tuning: lr=1 for the first hundred gradient descent steps, lr=0.5 for the second hundred, and lr=0.1 after.
n_steps = 1000
lr = 0.2
for i in range(1, n_steps + 1):
preds = [model(x) for x in xs]
l = binary_cross_entropy(preds, ys)
l.backward()
model.gradient_update(lr)
if i == 1 or i % 100 == 0:
print(f"step no. {i}, loss = {l.value}")
step no. 1, loss = 0.6421108496937449
step no. 100, loss = 0.5415495017511247
step no. 200, loss = 0.49626749234829115
step no. 300, loss = 0.47698455858939426
step no. 400, loss = 0.46502265852896363
step no. 500, loss = 0.4563883276075638
step no. 600, loss = 0.4485039041770576
step no. 700, loss = 0.4717202520255668
step no. 800, loss = 0.4536386186247771
step no. 900, loss = 0.4516829500601066
step no. 1000, loss = 0.4502377052139057
This training took a while to execute on my Lenovo Thinkpad and probably much more on the Read the Docs servers. (My apologies.) Again, this is the consequence of non-vectorized code. Is the model any good? Let’s see.
Show code cell source
visualize_model(model, xs, ys)
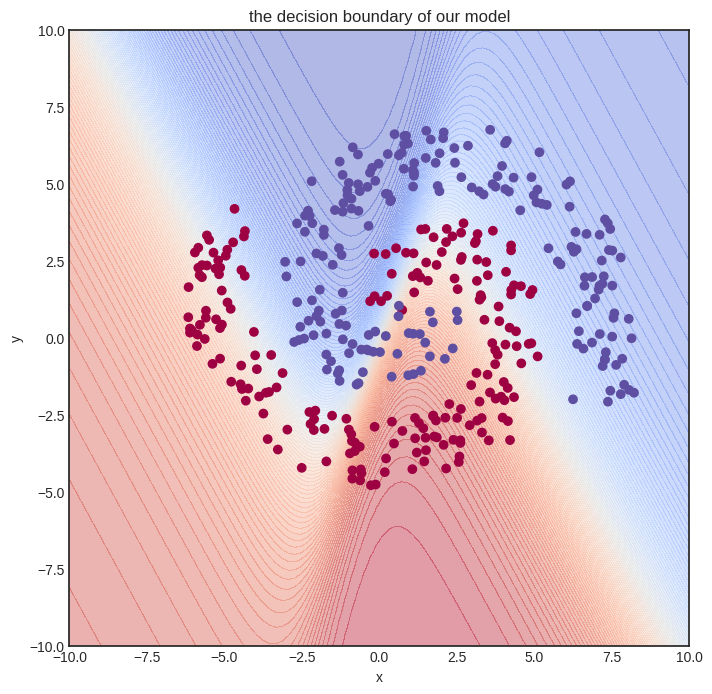
Eh. Not perfect at all, but we can already see that the decision boundary is starting to conform to the data. We need a more expressive model and more training iterations. Sadly, this is not possible due to build time restrictions. Remember that this interactive book is pre-built on Read the Docs servers, with fifteen minutes of total build time.
This hiccup foreshadows the need for more effective code, which we’ll bring to fruition with vectorization.
But let’s not get ahead of ourselves and see how Scalar works on the inside! Trust me on this: understanding plain scalar-valued computational graphs is paramount to building hyper-fast vectorized ones. We dial up the difficulty one notch at a time, and right now, the next step is digging deep into the forward pass.